

اهداف اصلی شبیه ساز، ایجاد یک فضا جهت طراحی و تست زیرسیستم ها و تست عملکرد شناورهای زیرسطحی هوشمند AUV درمحیط عملیات می باشد. این شبیه ساز قادراست قبل از ساخت وسیله تاثیرکلیه پارامترها شامل جرم هندسی ، آرایش تراسترها، قدرت تراسترها، آرایش بالک ها، تاثیر اثرات محیطی و سیستم های کنترل و ... را بررسی نماید. همچنین این نرم افزار بعنوان یک وسیله کمک آموزشی جهت طراحی و آموزش عملیات استفاده می شود.

شبیه ساز دارای ماژول های مختلف هیدرودینامیک، ماژول اثرات محیطی، هدایت ، کنترل و ماژول تعیین مسیر و طراحی ماموریت می باشد. این شبیه ساز قادر است شکل هندسی وسیله را از نرم افزار های طراحی دریافت نماید . همچنین interface های مختلف جهت ورود مشخصات جرمی مورد نظر، مشخصات هیدرودینامیکی ، شرایط محیطی، روش های کنترل با امکان تغییر پارامترها و همچنین تعریف نقاط هدف(Way Point) را دارا می باشد وهمچنین امکان تعریف محیط عملکرد به صورت سه بعدی درآن فراهم است . خروجی نرم افزار بصورت خروجی های عددی، نمودارهای مختلف و درنهایت یک محیط گرافیکی سه بعدی از محیط عملکرد رفتار وسیله است.
نرم افزار شامل بخش های ذیل می باشد :
- امکان تعریف AUVهای جدید و ویرایش مدل های قبلی آن
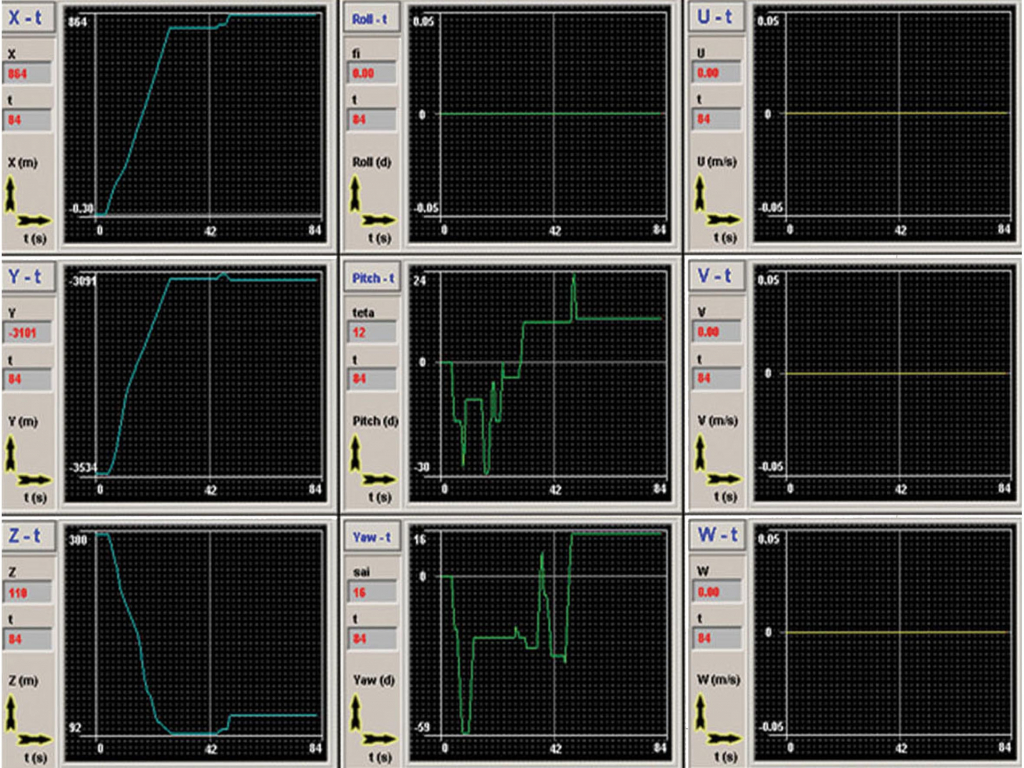
- شبیه سازی رفتار وسیله با توجه به معادلات دینامیکی
- شبیه سازی محیط عملکردAUV
- شبیه سازی روش های کنترل AUV و امکان افزودن کنترلرهای متفاوت جهت تست پاسخ آنها بصورت مجازی
- ارائه فضای سه بعدی گرافیکی ازعملکرد AUV مورد نظر
- شبیه سازی سیستم تعیین مسیرهوشمند
کاربرد شبیه سازهای نرم افزاری :
- استفاده در پروسه طراحی رفت و برگشتی وبهینه سازی فناوری مربوطه
- بکارگیری جهت توسعه نرم افزارهای مورد استفاده درفناوری مربوطه
- تست عملکرد زیرسیستم ها و عملکرد وسیله ها
- بررسی عملکرد روش های نوین مورد استفاده از فناوری مربوطه
- بکارگیری جهت جایگزینی تجهیزات پیچیده و گران قیمت باسیستم های نرم افزاری
- بکارگیری درپروسه طراحی عملیات و ...