

Virtual World for an Autonomous Underwater Vehicle
The main aim of simulation is to create a virtual world in order to design and test subsystems and test the function of AUVs in operating condition. This simulation is able to analyze the effect of parameters such as weight, shape, thruster arrangement, thruster power, environmental parameters and control systems before the construction of the device. Also, this software can aid in designing and operational training.
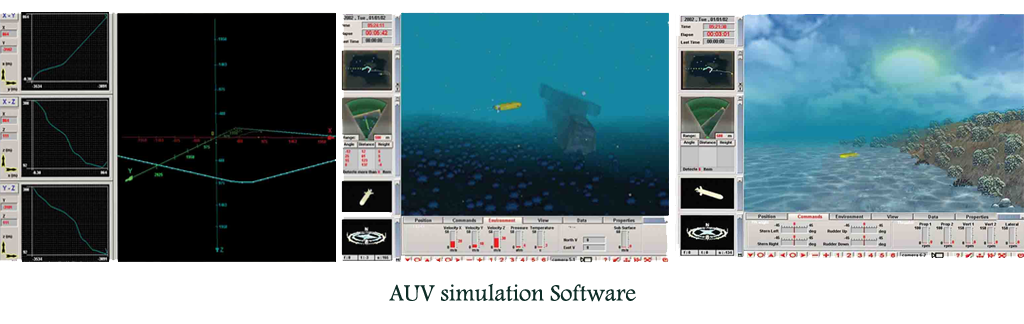
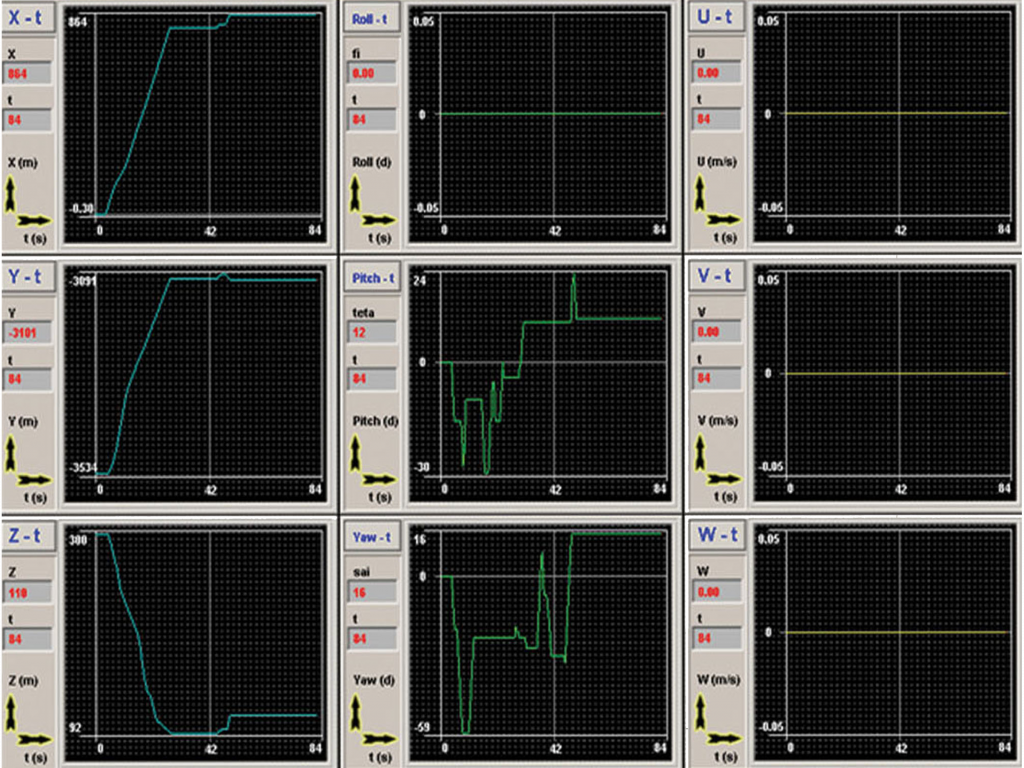
The simulator consists of hydrodynamic, environmental effects, steering, control modules as well as modules that determine the course and design the mission. This simulator is able to receive the device’s shape from the design software. Also, it includes different interfaces where weight characteristics, hydrodynamic environmental characteristics, environmental conditions, methods of control (with the possibility of parameter changes) and way points can be determined. It also allows the operating environmental to be defined in three dimensions. The software’s output is in the form of numbers, different graphs and eventually a three dimensional picture of the operating environment.