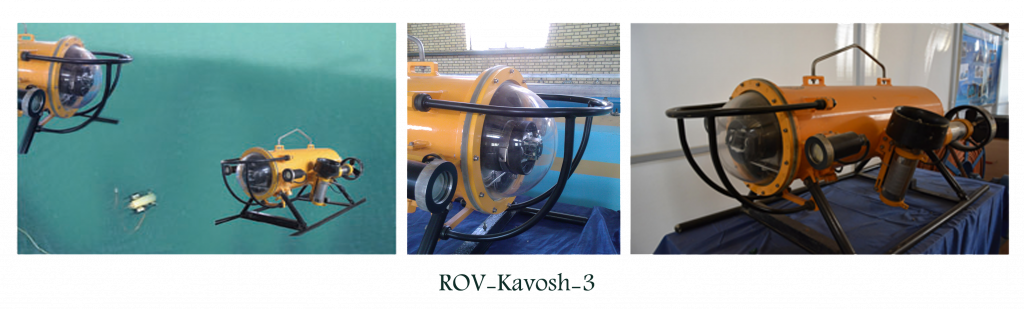
Underwater Robot (ROV) model Kavosh-3 is a lightweight operational ROV designed and built for underwater inspections. It is possible to lunch this ROV by a floating crane. Meanwhile, due to its low weight, it is possible for people to lunch it. This ROV has the usual features of light operational ROVs in the world. Due to the location of the thrusters, this system has good maneuverability and a camera with suitable quality for filming and underwater inspection. For case of underwater operation, automatic directional control and automatic depth control, as well as lateral time and forward time and forward trim are provided for this device.
The system cable is of marine type and has a minimum weight and the interface of cable and ROV during operation is very low. In designing and building other systems, according to previous experiences, attention has been paid to operation, ease of operation and providing appropriate information to operators. In designing this system, maximum use of domestic technologies has been paid to reduce dependence on foreign countries. due to the available experiences and facilities as well as specialized personnel, it is possible to provide support for maintenace in the shortest possible time.